
RAFT-Stereo: Multilevel Recurrent Field Transforms for Stereo Matching
Lahav Lipson 、 ZacharyTeed、Jia Deng
3DV 2021 best paper
Abstract
提出了一个基于RAFT的新型立体校正深度架构,比较新颖的是提出了多级卷积GRUs(multi-level convolutional GRUs),效果很好,泛化性和实时推理能力都不错。另外这个模型用于双目图像估计视差图,而不是光流。
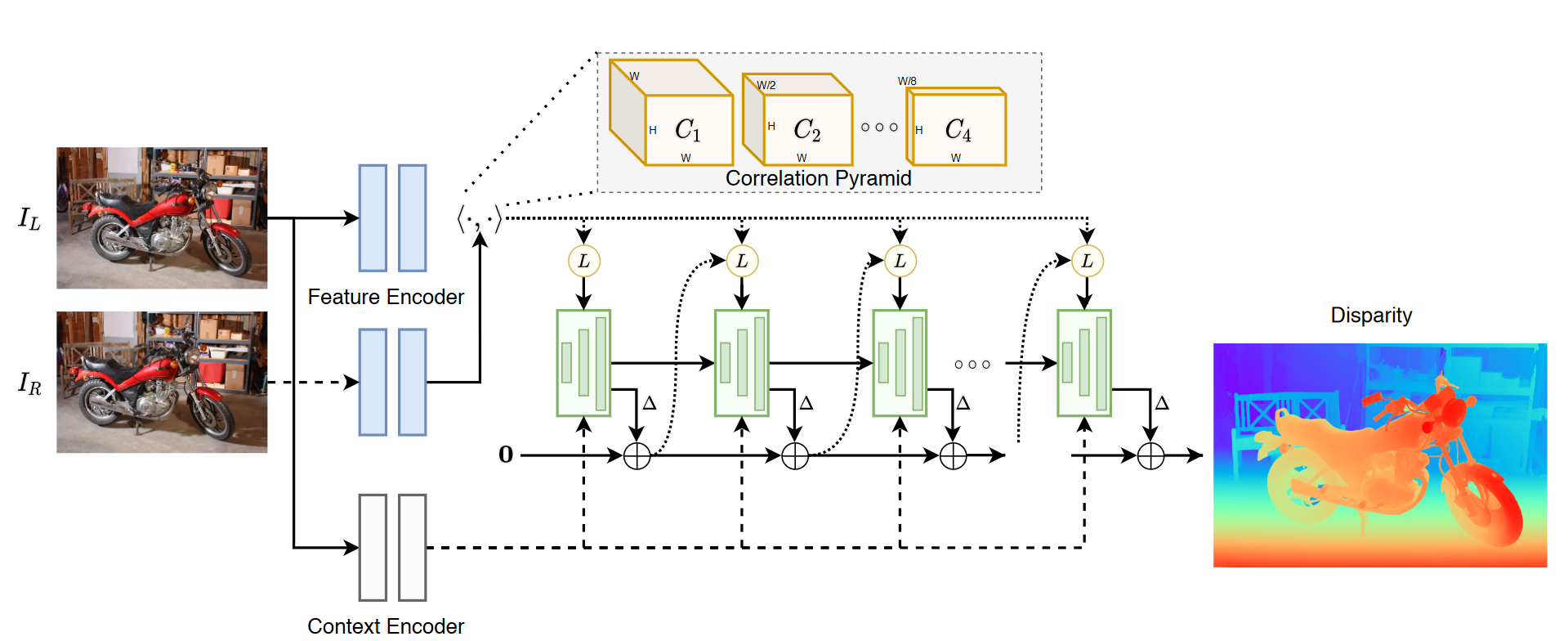
由特征编码器、相关联层、GRU更新层组成
feature encoder
与RAFT不同的是feature encoder中使用instance normalization,context encoder中使用batch normalization,context feature作为GRU模块的初始化隐藏状态
Computing Visual Similarity
与RAFT不同的是构建3D correlation volume而不是4D,原因是本文中输入图像像素的位移只在水平方向上发生,而RAFT中像素位移发生在水平和竖直两个方向(rectified stereo)

correlation pyramid
前两层维度不变,只对最后一个维度进行pooling操作,目的与RAFT相同,保证同时捕捉到较大和较小的像素位移。
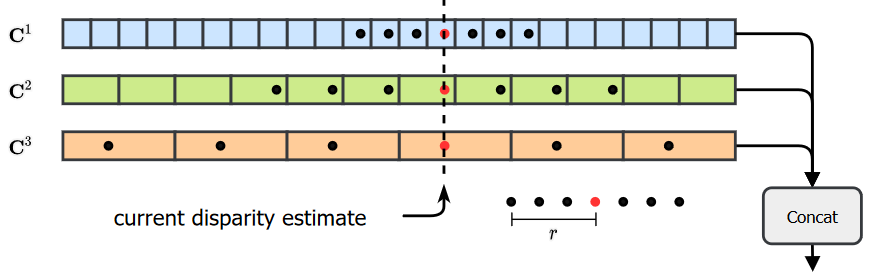
correlation lookup
使用一个类似于RAFT中定义的查找算子与线性插值来实现检索。给定当前估计的视差, 我们可以在correlation volume中反向寻找对应像素位置处的代价元素, 在每个层级的correlation volume中构建1D的网格来限定查找范围, 然后将不同层级的1D网格元素拼接形成一个单独的feature map.
Multi-Level Update Operator
RAFT的更新模块运行在固定的高分辨率尺度上,会导致卷积核感受野增长不明显,提出multi-resolution update operator(适用于无纹理区域较大,局部信息较少的场景),同步更新分辨率的1/8, 1/16, 1/32的feature map,多个GRU单元之间交叉互联, 交错使用隐藏状态, 但是查找correlation volume和更新最终视差始终在最高分辨率那层的GRU单元进行。
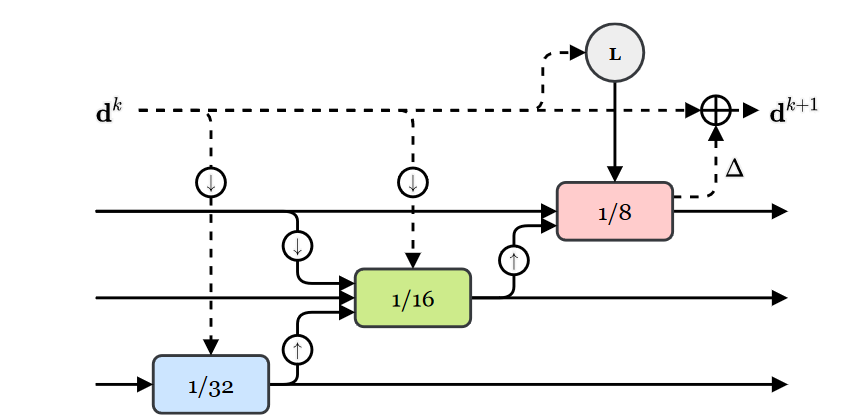
dk表示第k次迭代得到视差图d。一次迭代分别进行小中大三个分辨率的更新,隐层也包含三个分辨率,信息在三种分辨率(3个GRU模块)的传递经过上下采样,先从小分辨率开始,得到的结果输入到中分辨率,最后到大分辨率,大分辨率同时输入了查表得到的相关性特征,并在最大分辨率更新视差增量,从而得到新一次迭代的视差图。
Slow-Fast GRU
小分辨率更新多次再更新一次大分辨率,为了保持精度下尽可能减少高分辨更新次数,可使得运行时间缩短,性能略有下降。
Loss
与RAFT类似,L1损失,总损失是真实值与上采样预测之间每个循环块输出的损失之和。

Innovation
- 将光流预测的模型用于双目视差估计,与传统视差估计不同
- 提出的多级卷积GRUs效果较好