
RAFT: Recurrent All-Pairs Field Transforms for Optical Flow
Zachary Teed and Jia Deng ECCV2020 best paper
Abstract
提出了Recurrent All-Pairs Field Transforms(RAFT), 一个光流估计的深度神经网络。RAFT 提取像素级的特征,为所有像素建立多尺度 4D 关联信息,通过查找4D关联信息,循环迭代的更新光流场。
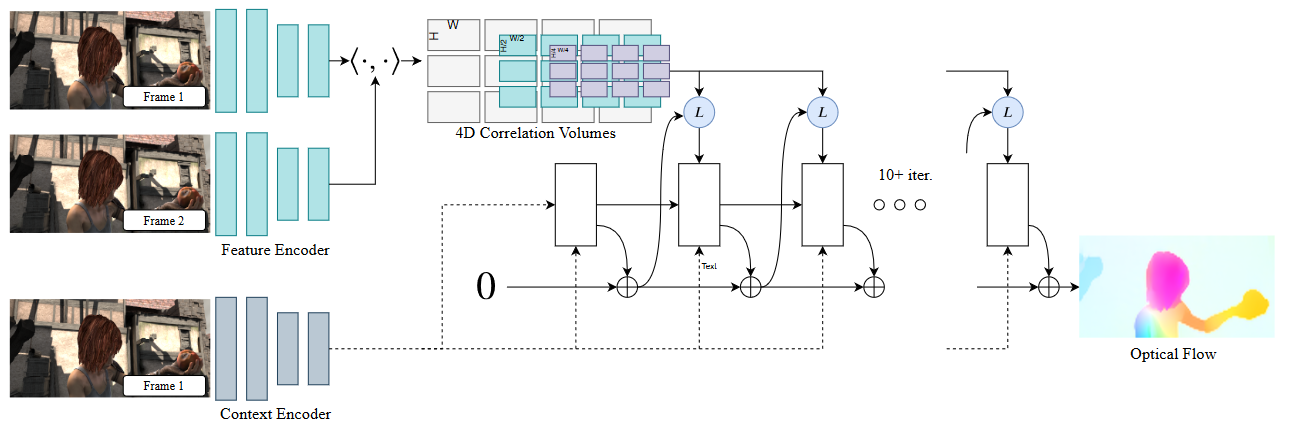
由特征编码器、相关联层、GRU更新层组成
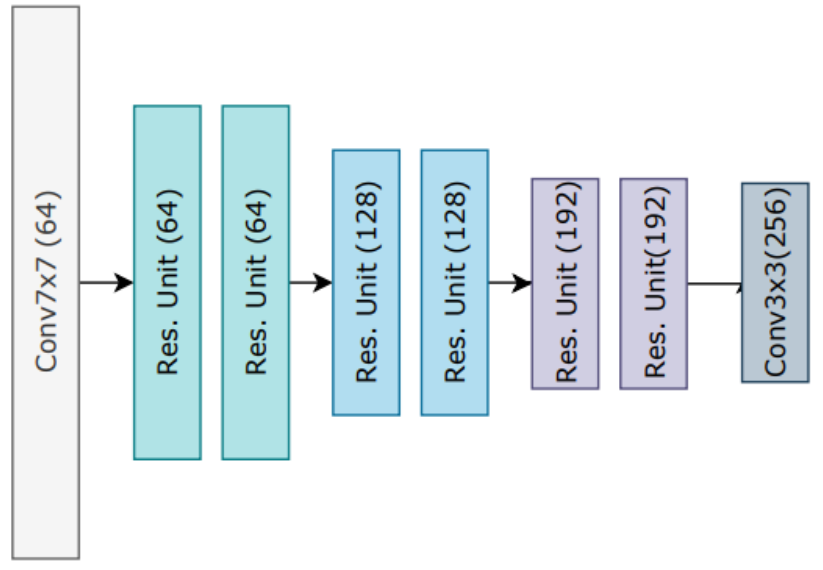
feature encoder
使用了两个共享权值的CNN,从输入的两张图片中提取像素特征,输出为原输入的1/8倍的特征图。同样的CNN架构也用于上下文网络(Context network),它只从第一张图像生成特征。在归一化方法上只有一个区别——特征提取器使用实例归一化,而上下文网络使用批处理归一化。
Computing Visual Similarity
Correlation Pyramid
首先基于两个图片的特征图计算correlation volume C

然后通过对C使用不同尺度的池化得到correlation volume,构成correlation pyramid(后两层进行pooling,前两层维度不变),也就是一个四维张量C,它提供了关于大小像素位移的关键信息。因为C非常大,所以进行降维产生四个不同维度的张量,这样操作可以保证同时捕捉到较大和较小的像素位移。

correlation lookup
对于每个像素而言只需要查找出与他相关的correlation region即可,定义了一个查询算子,通过从相关金字塔中索引来生成特征图。对于第一个图片中的像素点\(x = ( u , v )\)查找pyramid中对应特征,将frame1图像的点根据当前的光流场估计\(( f ^ { 1 } , f ^ { 2 } )\)映射到frame2上的\(x ^ { \prime } = ( u + f ^ { 1 } ( u ) , v + f ^ { 2 } ( v ) )\),定义的搜索域表示为下述公式,其中r为搜索半径,把四个层提取到的特征concat到一个特征中

GRU iterative update
迭代更新基于一个GRU,因为图像特征是2维的,所以分别在水平和竖直两个方向做GRU。
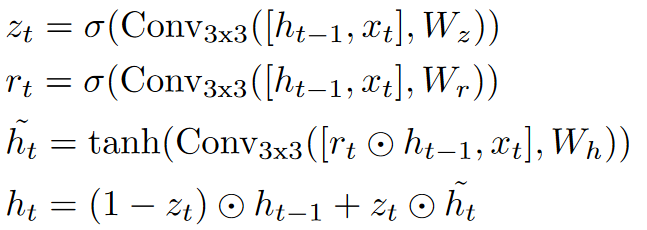
输入为迭代预测的光流,相关特征,上下文特征;输出 $\Delta _ { f }$,则当前迭代下预测的光流就是 $f _ { k + 1 } = f _ { k + 1 } + \Delta _ { f } $
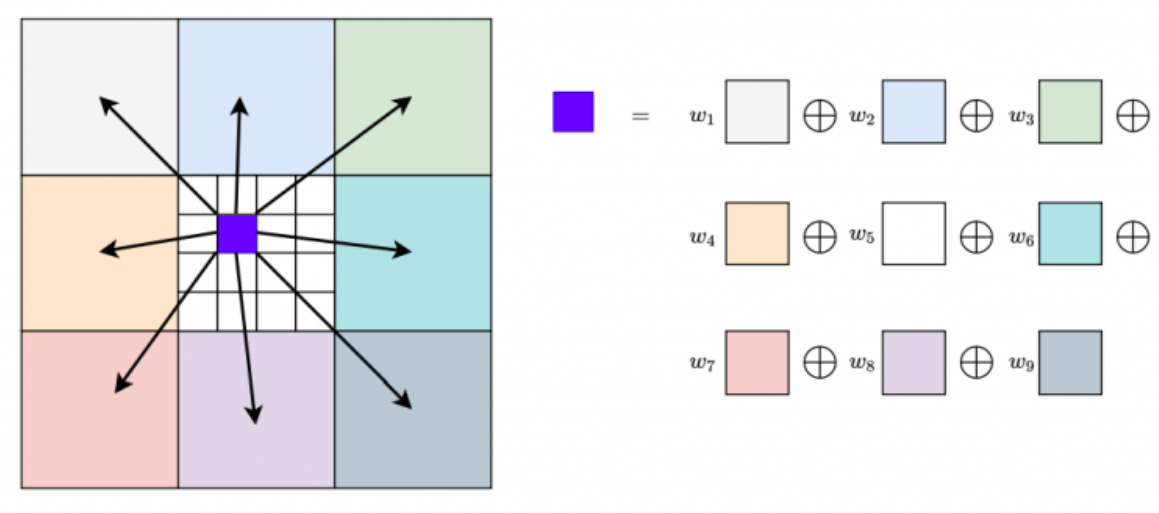
Upsample
GRU单元输出的光流分辨率为初始图像的1/8,因此作者提出了两种不同的上采样方法来匹配真值分辨率。第一种是光流的双线性插值。它是一种简单快速的方法,但这种方法的质量不如凸上采样(Convex Upsampling)。
凸上采样(Convex Upsampling)方法表明,全分辨率光流是GRU单元预测的3x3加权网格的凸组合。8 倍图像上采样意味着必须将 1 个像素扩展为 64(8x8) 个像素。凸上采样模块由两个卷积层和末端的softmax激活来预测上采样光流预测中每个新像素的H / 8 × W / 8 × ( 8 × 8 × 9 )掩码。现在,上采样图像上的每个像素都是之前粗糙分辨率像素的凸组合,由预测掩码加权,系数为w1到w9。
Loss
L1损失,总损失是真实值与上采样预测之间每个循环块输出的损失之和。加权系数来自于指数计算
Innovation
- 引入了motion feature,而motion feature的计算通过金字塔4D关系矩阵均匀采样得来。
- 引入了GRU概念进行迭代优化
- RAFT维护和更新单个固定高分辨率的光流场,而不是coarse-to-fine,首先在低分辨率下估计光流,然后上采样到高分辨率和并细化。